
Week 12: 4/3/2023 - 4/7/2023: Daniel and Bibi's Work
- Bechise Dyl
- Apr 6, 2023
- 1 min read

This week, the focus of the group was to integrate the tracking code with the robotic arm using the Arduino Mega. In order to start looking into this task, the module Serial had to be installed on python. This module essentially communicates to the connection within the laptop/desktop. Once the Arduino is connected to the device, the user will have to identify which COM port is being used. Along with the port being used, the baud rate is needed so that the speed of the motor can be accurate.

Adding another line in the code which is supposed to send the x and y coordinates of the hand landmarks to the arduino. The id is a placeholder for the current position of the landmark while lm is the new position. The code below is seen to loop through the landmarks and keep track of the landmark point's movements. The h, w, c seen in the code is taking the input from the openCV output (the camera footage basically). Once these coordinates are taken, it is then supposed to send the information to the arduino which should move the motors.

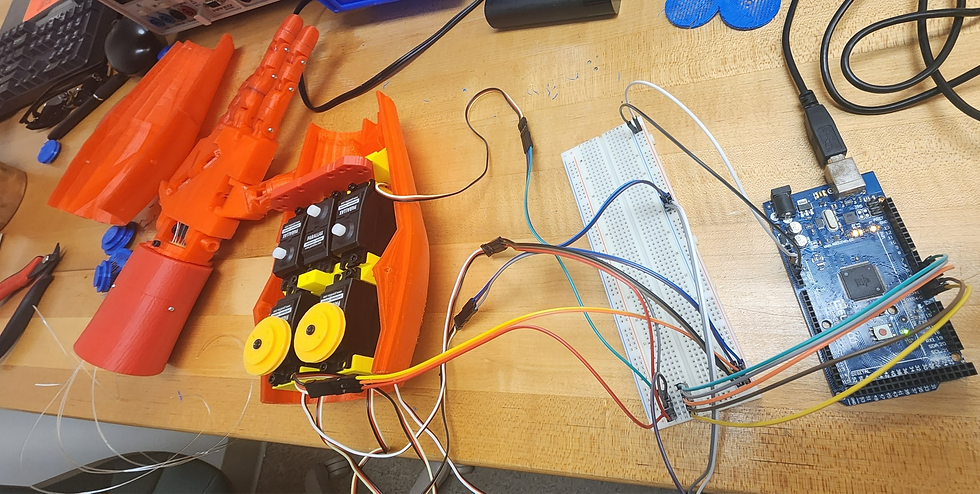
As this was a test to see if the motors can be moved based on the tracking movements, unfortunately after sending the code to the arduino, the servos did not move. The servos were tested separately and worked fine. The 3D printed materials placed on the servo motors did not have enough tension to stay on. Meaning that they slipped off when power was applied to the motors. Some pieces need to be reprinted in order to continue testing.



Comments